
Rover written with RUST
Fourth-3 : Filtering Data
2025.10.28 22:38
-
(0, 0, 0)is the optical center of the left camera. -
+X is to the right.
-
+Y is downwards.
-
+Z is forwards (depth).
let's refine the filter based on your camera height.
-
The ground is approximately at
Y = +100mm(since Y points down).
I want to keep points relevant to the ground plane. A good starting point would be to keep points from slightly above the camera down to just below the ground level to account for noise or small bumps.
Let's try keeping points where the Y coordinate is between -50mm (5cm above the camera) and +150mm (5cm below the estimated ground plane).
// =======================================
use opencv::{
prelude::*,
core::{self, Mat, Size2i, Rect, Scalar, CV_32FC1, CV_8UC1, BORDER_CONSTANT, NORM_MINMAX, CV_16S},
calib3d::{self, stereo_rectify, init_undistort_rectify_map, StereoBM, reproject_image_to_3d},
imgcodecs::{self, IMREAD_COLOR},
imgproc::{self, COLOR_BGR2GRAY, COLORMAP_JET},
highgui::{self, WINDOW_AUTOSIZE},
Result,
Error,
};
use serde::{Deserialize, Serialize};
use std::fs;
use std::fs::File;
use std::io::{BufWriter, Write};
// --- Configuration ---
const CALIBRATION_FILE: &str = "../main_data/stereo_params.yml";
const TEST_IMAGE_INDEX: u32 = 0;
const DATA_DIR: &str = "../rover_vo";
const OUTPUT_POINT_CLOUD_FILE: &str = "point_cloud_filtered_full.txt";
// --- Data Structure for OpenCV Mat ---
#[derive(Debug, Deserialize, Serialize)]
struct MatData {
dt: String,
rows: i32,
cols: i32,
data: Vec<f64>,
}
// --- Data Structure for the ENTIRE YAML file ---
#[derive(Debug, Deserialize, Serialize)]
struct StereoParams {
image_width: i32,
image_height: i32,
rms_error: f64,
#[serde(rename = "K1")]
k1: MatData,
#[serde(rename = "D1")]
d1: MatData,
#[serde(rename = "K2")]
k2: MatData,
#[serde(rename = "D2")]
d2: MatData,
#[serde(rename = "R")]
r: MatData,
#[serde(rename = "T")]
t: MatData,
}
// --- Helper function to convert MatData struct to an OpenCV Mat ---
fn mat_from_data(data: &MatData) -> Result<Mat> {
if data.dt != "d" {
return Err(Error::new(core::Code::StsError.into(), "Data type must be f64 ('d')"));
}
let cols = data.cols as usize;
if cols == 0 {
return Err(Error::new(core::Code::StsError.into(), "Matrix data has 0 columns."));
}
let rows: Vec<&[f64]> = data.data.chunks(cols).collect();
let mat = Mat::from_slice_2d(&rows)?;
Ok(mat)
}
fn run_depth_pipeline() -> Result<()> {
// --- 1. Load Calibration Data ---
println!("--- 1. Loading Calibration Data from {} ---", CALIBRATION_FILE);
let yaml_content = fs::read_to_string(CALIBRATION_FILE)
.map_err(|e| Error::new(core::Code::StsError.into(), &format!("Failed to read calibration file: {}", e)))?;
let params: StereoParams = serde_yaml::from_str(&yaml_content)
.map_err(|e| Error::new(core::Code::StsError.into(), &format!("YAML Deserialize Error: {}. Check stereo_params.yml format.", e)))?;
let image_size = Size2i::new(params.image_width, params.image_height);
println!("Converting loaded data into OpenCV Mats...");
let k1 = mat_from_data(¶ms.k1)?;
let d1 = mat_from_data(¶ms.d1)?;
let k2 = mat_from_data(¶ms.k2)?;
let d2 = mat_from_data(¶ms.d2)?;
let r_stereo = mat_from_data(¶ms.r)?;
let t_stereo = mat_from_data(¶ms.t)?;
println!("Calibration Data Loaded. RMS Error: {:.4}, Image size: {}x{}", params.rms_error, image_size.width, image_size.height);
// --- 2. Stereo Rectification ---
let (mut r1, mut r2) = (Mat::default(), Mat::default());
let (mut p1, mut p2) = (Mat::default(), Mat::default());
let (mut q, mut roi1, mut roi2) = (Mat::default(), Rect::default(), Rect::default());
println!("--- 2. Calculating Rectification Maps ---");
calib3d::stereo_rectify(
&k1, &d1, &k2, &d2,
image_size,
&r_stereo, &t_stereo,
&mut r1, &mut r2, &mut p1, &mut p2, &mut q,
calib3d::CALIB_ZERO_DISPARITY, -1.0, image_size,
&mut roi1, &mut roi2,
)?;
// --- 3. Compute Undistortion and Remapping Maps ---
let (mut map1x, mut map1y) = (Mat::default(), Mat::default());
let (mut map2x, mut map2y) = (Mat::default(), Mat::default());
calib3d::init_undistort_rectify_map(
&k1, &d1, &r1, &p1, image_size,
core::CV_32FC1, &mut map1x, &mut map1y,
)?;
calib3d::init_undistort_rectify_map(
&k2, &d2, &r2, &p2, image_size,
core::CV_32FC1, &mut map2x, &mut map2y,
)?;
println!("Rectification maps generated successfully.");
// --- 4. Load Test Image Pair ---
let left_path = format!("{}/left_frame_{:05}.jpg", DATA_DIR, TEST_IMAGE_INDEX);
let right_path = format!("{}/right_frame_{:05}.jpg", DATA_DIR, TEST_IMAGE_INDEX);
println!("--- 4. Loading Test Images: {} and {} ---", left_path, right_path);
let src_l = imgcodecs::imread(&left_path, IMREAD_COLOR)?;
let src_r = imgcodecs::imread(&right_path, IMREAD_COLOR)?;
if src_l.empty() || src_r.empty() {
return Err(Error::new(core::Code::StsError.into(), &format!("Failed to load test image pair index {}.", TEST_IMAGE_INDEX)));
}
// --- 5. Apply Remapping to Rectify Images ---
let (mut rectified_l, mut rectified_r) = (Mat::default(), Mat::default());
println!("--- 5. Applying Undistortion and Rectification via Remap ---");
imgproc::remap(
&src_l, &mut rectified_l,
&map1x, &map1y,
imgproc::INTER_LINEAR, BORDER_CONSTANT, core::Scalar::default(),
)?;
imgproc::remap(
&src_r, &mut rectified_r,
&map2x, &map2y,
imgproc::INTER_LINEAR, BORDER_CONSTANT, core::Scalar::default(),
)?;
// --- 6. Compute Disparity Map (Using Tuned StereoBM) ---
println!("--- 6. Computing Disparity Map with Tuned StereoBM ---");
let (mut gray_l, mut gray_r) = (Mat::default(), Mat::default());
imgproc::cvt_color(&rectified_l, &mut gray_l, COLOR_BGR2GRAY, 0)?;
imgproc::cvt_color(&rectified_r, &mut gray_r, COLOR_BGR2GRAY, 0)?;
let num_disparities = 16 * 8;
let block_size = 15;
let mut stereo = StereoBM::create(num_disparities, block_size)?;
let mut disp_map = Mat::default(); // CV_16S
stereo.compute(&gray_l, &gray_r, &mut disp_map)?;
// --- 7. Reproject and Save Filtered FULL 3D Point Cloud ---
println!("--- 7a. Converting and Scaling Disparity Map ---");
let mut disp_map_float = Mat::default();
disp_map.convert_to(&mut disp_map_float, core::CV_32F, 1.0 / 16.0, 0.0)?; // Divide by 16
println!("--- 7b. Reprojecting to 3D ---");
let mut point_cloud_full = Mat::default(); // 640x480, CV_32FC3 (Vec3f)
calib3d::reproject_image_to_3d(&disp_map_float, &mut point_cloud_full, &q, false, -1)?;
println!("--- 7c. Saving filtered points from full cloud to {} ---", OUTPUT_POINT_CLOUD_FILE);
let file = File::create(OUTPUT_POINT_CLOUD_FILE)
.map_err(|e| Error::new(core::Code::StsError.into(), &format!("Failed to create file: {}", e)))?;
let mut writer = BufWriter::new(file);
writeln!(writer, "# 640x480 Filtered Point Cloud (Z < 3000mm, -50mm < Y < 150mm)") // Updated header
.map_err(|e| Error::new(core::Code::StsError.into(), &format!("Failed to write to file: {}", e)))?;
writeln!(writer, "# Format: (X, Y, Z) in millimeters")
.map_err(|e| Error::new(core::Code::StsError.into(), &format!("Failed to write to file: {}", e)))?;
let mut valid_points_count = 0;
for r in 0..point_cloud_full.rows() {
for c in 0..point_cloud_full.cols() {
let point = point_cloud_full.at_2d::<core::Vec3f>(r, c)?;
let (x, y, z) = (point[0], point[1], point[2]);
// Filter points: in front (<3m), and vertically between -50mm and +150mm
if z.is_finite() && z > 0.0 && z < 3000.0 && y > -50.0 && y < 150.0 { // Ground plane filter
writeln!(writer, "({}, {}, {})", x, y, z)
.map_err(|e| Error::new(core::Code::StsError.into(), &format!("Failed to write to file: {}", e)))?;
valid_points_count += 1;
}
}
}
println!("--- Done saving. Found {} valid points (out of {}). ---", valid_points_count, image_size.width * image_size.height);
// --- 8. Visualize Results ---
let mut disp_map_normalized = Mat::default();
core::normalize(&disp_map, &mut disp_map_normalized, 0.0, 255.0, NORM_MINMAX, -1, &Mat::default())?;
let mut disp_map_8u = Mat::default();
disp_map_normalized.convert_to(&mut disp_map_8u, CV_8UC1, 1.0, 0.0)?;
let mut disp_color = Mat::default();
imgproc::apply_color_map(&disp_map_8u, &mut disp_color, COLORMAP_JET)?;
let mut combined_rect = Mat::default();
core::hconcat2(&rectified_l, &rectified_r, &mut combined_rect)?;
let combined_width = combined_rect.cols();
for i in (0..combined_rect.rows()).step_by(50) {
imgproc::line(&mut combined_rect, core::Point::new(0, i), core::Point::new(combined_width, i), core::Scalar::new(0.0, 255.0, 0.0, 0.0), 1, 8, 0)?;
}
println!("\nRectification and Disparity complete. Check the displayed windows!");
println!("Press 'q' in any image window to exit...");
highgui::named_window("Rectified Stereo Pair", WINDOW_AUTOSIZE)?;
highgui::imshow("Rectified Stereo Pair", &combined_rect)?;
highgui::named_window("Disparity Map (Depth)", WINDOW_AUTOSIZE)?;
highgui::imshow("Disparity Map (Depth)", &disp_color)?;
highgui::wait_key(0)?;
highgui::destroy_all_windows()?;
Ok(())
}
fn main() {
if let Err(e) = run_depth_pipeline() {
eprintln!("Application Error: {:?}", e);
}
}
//====================================
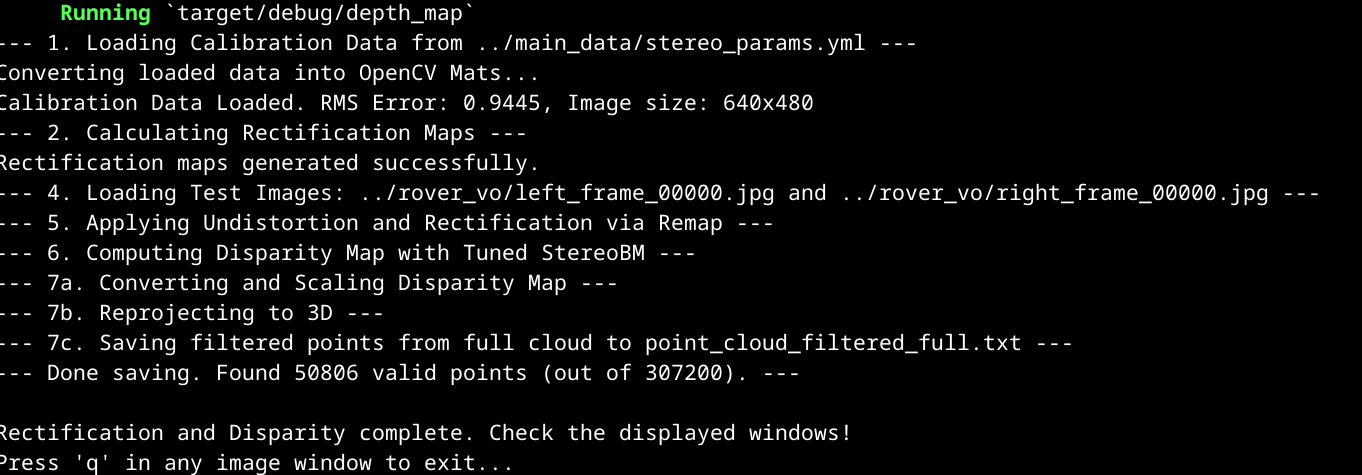
I still have 50806 data points.
It is too much for a ground crawling rover, but I'm keeping this for mapping practice + visual odometry practice.
Comment 0
| No. | Subject | Author | Date | Views |
|---|---|---|---|---|
| 8 |
Fifth : Visual Odometry
| me | 2025.10.28 | 0 |
| » |
Fourth-3 : Filtering Data
| me | 2025.10.28 | 0 |
| 6 |
Fourth-2 : Shrink down data count (4x4 block)
| me | 2025.10.28 | 0 |
| 5 |
Fourth : Depth Map
| me | 2025.10.28 | 0 |
| 4 |
Third : Rectify calibrated result
| me | 2025.10.28 | 0 |
| 3 | Second : Calibration using checker board [1] | me | 2025.10.28 | 0 |
| 2 |
First : Stereo Camera's image generation for calibration
| me | 2025.10.28 | 0 |
| 1 | Set-up in x64 Debian for development | me | 2025.10.27 | 0 |