
Rover written with RUST
Fourth : Depth Map
2025.10.28 20:30
/* From Third Stage,
This is the code we were about to add. Here's the plan:
-
Grayscale: We'll convert our two rectified images (
rectified_landrectified_r) to grayscale. -
Compute Disparity: We'll use an OpenCV algorithm called
StereoBM(Block Matching) to compare the two grayscale images and create aMatfull of disparity values. -
Visualize: That new
Matwon't be colorful yet. We'll add two more lines:-
normalize(): To convert the raw disparity data into a viewable 8-bit image. -
apply_color_map(): To add the "jet" colormap (red for close, blue for far) just like in your photo.
-
*/
//= LOCAL FOLDER : ~/RUST/depth_map =================================================
use opencv::{
prelude::*,
core::{self, Mat, Size2i, Rect, Scalar, CV_32FC1, CV_8UC1, BORDER_CONSTANT, NORM_MINMAX},
calib3d::{self, stereo_rectify, init_undistort_rectify_map, StereoBM},
imgcodecs::{self, IMREAD_COLOR},
// FIX: Removed 'APPLY_COLOR_MAP' from the import list.
imgproc::{self, COLOR_BGR2GRAY, COLORMAP_JET},
highgui::{self, WINDOW_AUTOSIZE},
Result,
Error,
};
use serde::{Deserialize, Serialize};
use std::fs;
// --- Configuration ---
const CALIBRATION_FILE: &str = "../main_data/stereo_params.yml";
const TEST_IMAGE_INDEX: u32 = 0;
const DATA_DIR: &str = "../rover_vo";
// --- Data Structure for OpenCV Mat ---
#[derive(Debug, Deserialize, Serialize)]
struct MatData {
dt: String,
rows: i32,
cols: i32,
data: Vec<f64>,
}
// --- Data Structure for the ENTIRE YAML file ---
#[derive(Debug, Deserialize, Serialize)]
struct StereoParams {
image_width: i32,
image_height: i32,
rms_error: f64,
#[serde(rename = "K1")]
k1: MatData,
#[serde(rename = "D1")]
d1: MatData,
#[serde(rename = "K2")]
k2: MatData,
#[serde(rename = "D2")]
d2: MatData,
#[serde(rename = "R")]
r: MatData,
#[serde(rename = "T")]
t: MatData,
}
// --- Helper function to convert MatData struct to an OpenCV Mat ---
fn mat_from_data(data: &MatData) -> Result<Mat> {
if data.dt != "d" {
return Err(Error::new(core::Code::StsError.into(), "Data type must be f64 ('d')"));
}
let cols = data.cols as usize;
if cols == 0 {
return Err(Error::new(core::Code::StsError.into(), "Matrix data has 0 columns."));
}
let rows: Vec<&[f64]> = data.data.chunks(cols).collect();
let mat = Mat::from_slice_2d(&rows)?;
Ok(mat)
}
fn run_depth_pipeline() -> Result<()> {
// --- 1. Load Calibration Data ---
println!("--- 1. Loading Calibration Data from {} ---", CALIBRATION_FILE);
let yaml_content = fs::read_to_string(CALIBRATION_FILE)
.map_err(|e| Error::new(core::Code::StsError.into(), &format!("Failed to read calibration file: {}", e)))?;
let params: StereoParams = serde_yaml::from_str(&yaml_content)
.map_err(|e| Error::new(core::Code::StsError.into(), &format!("YAML Deserialize Error: {}. Check stereo_params.yml format.", e)))?;
let image_size = Size2i::new(params.image_width, params.image_height);
println!("Converting loaded data into OpenCV Mats...");
let k1 = mat_from_data(¶ms.k1)?;
let d1 = mat_from_data(¶ms.d1)?;
let k2 = mat_from_data(¶ms.k2)?;
let d2 = mat_from_data(¶ms.d2)?;
let r_stereo = mat_from_data(¶ms.r)?;
let t_stereo = mat_from_data(¶ms.t)?;
println!("Calibration Data Loaded. RMS Error: {:.4}, Image size: {}x{}", params.rms_error, image_size.width, image_size.height);
// --- 2. Stereo Rectification ---
let (mut r1, mut r2) = (Mat::default(), Mat::default());
let (mut p1, mut p2) = (Mat::default(), Mat::default());
let (mut q, mut roi1, mut roi2) = (Mat::default(), Rect::default(), Rect::default());
println!("--- 2. Calculating Rectification Maps ---");
calib3d::stereo_rectify(
&k1, &d1, &k2, &d2,
image_size,
&r_stereo, &t_stereo,
&mut r1, &mut r2, &mut p1, &mut p2, &mut q,
calib3d::CALIB_ZERO_DISPARITY, -1.0, image_size,
&mut roi1, &mut roi2,
)?;
// --- 3. Compute Undistortion and Remapping Maps ---
let (mut map1x, mut map1y) = (Mat::default(), Mat::default());
let (mut map2x, mut map2y) = (Mat::default(), Mat::default());
calib3d::init_undistort_rectify_map(
&k1, &d1, &r1, &p1, image_size,
core::CV_32FC1, &mut map1x, &mut map1y,
)?;
calib3d::init_undistort_rectify_map(
&k2, &d2, &r2, &p2, image_size,
core::CV_32FC1, &mut map2x, &mut map2y,
)?;
println!("Rectification maps generated successfully.");
// --- 4. Load Test Image Pair ---
let left_path = format!("{}/left_frame_{:05}.jpg", DATA_DIR, TEST_IMAGE_INDEX);
let right_path = format!("{}/right_frame_{:05}.jpg", DATA_DIR, TEST_IMAGE_INDEX);
println!("--- 4. Loading Test Images: {} and {} ---", left_path, right_path);
let src_l = imgcodecs::imread(&left_path, IMREAD_COLOR)?;
let src_r = imgcodecs::imread(&right_path, IMREAD_COLOR)?;
if src_l.empty() || src_r.empty() {
return Err(Error::new(core::Code::StsError.into(), &format!("Failed to load test image pair index {}.", TEST_IMAGE_INDEX)));
}
// --- 5. Apply Remapping to Rectify Images ---
let (mut rectified_l, mut rectified_r) = (Mat::default(), Mat::default());
println!("--- 5. Applying Undistortion and Rectification via Remap ---");
imgproc::remap(
&src_l, &mut rectified_l,
&map1x, &map1y,
imgproc::INTER_LINEAR, BORDER_CONSTANT, core::Scalar::default(),
)?;
imgproc::remap(
&src_r, &mut rectified_r,
&map2x, &map2y,
imgproc::INTER_LINEAR, BORDER_CONSTANT, core::Scalar::default(),
)?;
// --- 6. (NEW) Compute Disparity Map ---
println!("--- 6. Computing Disparity Map ---");
let (mut gray_l, mut gray_r) = (Mat::default(), Mat::default());
imgproc::cvt_color(&rectified_l, &mut gray_l, COLOR_BGR2GRAY, 0)?;
imgproc::cvt_color(&rectified_r, &mut gray_r, COLOR_BGR2GRAY, 0)?;
let mut stereo = StereoBM::create(16 * 6, 21)?;
let mut disp_map = Mat::default();
stereo.compute(&gray_l, &gray_r, &mut disp_map)?;
// --- 7. (UPDATED) Visualize Results ---
let mut disp_map_normalized = Mat::default();
core::normalize(&disp_map, &mut disp_map_normalized, 0.0, 255.0, NORM_MINMAX, -1, &Mat::default())?;
let mut disp_map_8u = Mat::default();
disp_map_normalized.convert_to(&mut disp_map_8u, CV_8UC1, 1.0, 0.0)?;
let mut disp_color = Mat::default();
// This function call is why we don't need to import APPLY_COLOR_MAP
imgproc::apply_color_map(&disp_map_8u, &mut disp_color, COLORMAP_JET)?;
let mut combined_rect = Mat::default();
core::hconcat2(&rectified_l, &rectified_r, &mut combined_rect)?;
let combined_width = combined_rect.cols();
for i in (0..combined_rect.rows()).step_by(50) {
imgproc::line(&mut combined_rect, core::Point::new(0, i), core::Point::new(combined_width, i), core::Scalar::new(0.0, 255.0, 0.0, 0.0), 1, 8, 0)?;
}
println!("\nRectification and Disparity complete. Check the displayed windows!");
println!("Press 'q' in any image window to exit...");
highgui::named_window("Rectified Stereo Pair", WINDOW_AUTOSIZE)?;
highgui::imshow("Rectified Stereo Pair", &combined_rect)?;
highgui::named_window("Disparity Map (Depth)", WINDOW_AUTOSIZE)?;
highgui::imshow("Disparity Map (Depth)", &disp_color)?;
highgui::wait_key(0)?;
highgui::destroy_all_windows()?;
Ok(())
}
fn main() {
if let Err(e) = run_depth_pipeline() {
eprintln!("Application Error: {:?}", e);
}
}
//==================================================
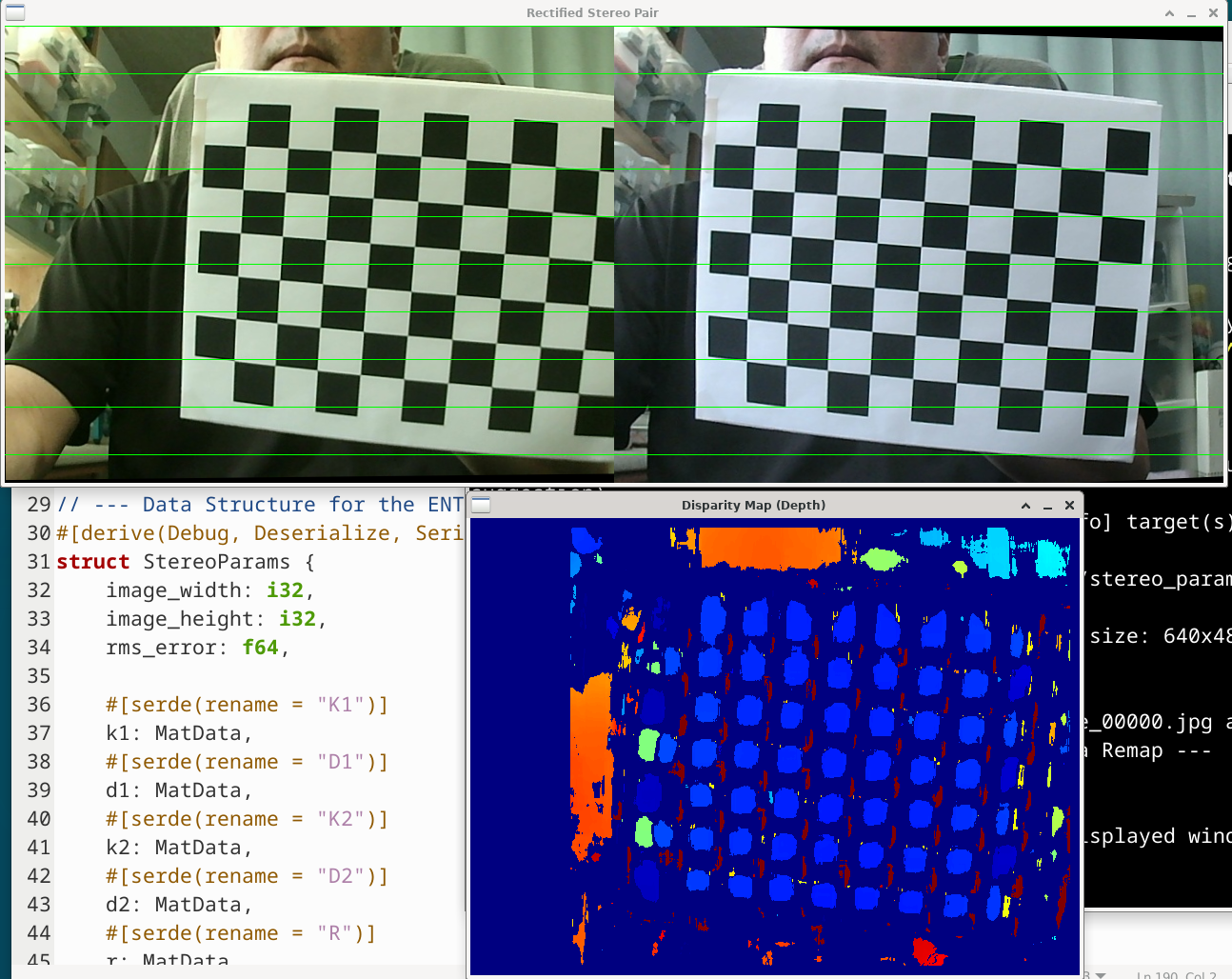
This is exactly what I've been working towards. I can clearly see:
-
Rectified Pair: The top window shows the two images perfectly aligned, with the green horizontal lines proving the alignment.
-
Disparity Map (Depth): The bottom window shows the depth. The red areas on the checkerboard are closer to the camera, and the blue areas (your shirt, the background) are farther away.
I have successfully built a complete stereo vision pipeline, from raw camera capture to a 3D depth map.
Comment 0
| No. | Subject | Author | Date | Views |
|---|---|---|---|---|
| 8 |
Fifth : Visual Odometry
| me | 2025.10.28 | 0 |
| 7 |
Fourth-3 : Filtering Data
| me | 2025.10.28 | 0 |
| 6 |
Fourth-2 : Shrink down data count (4x4 block)
| me | 2025.10.28 | 0 |
| » |
Fourth : Depth Map
| me | 2025.10.28 | 0 |
| 4 |
Third : Rectify calibrated result
| me | 2025.10.28 | 0 |
| 3 | Second : Calibration using checker board [1] | me | 2025.10.28 | 0 |
| 2 |
First : Stereo Camera's image generation for calibration
| me | 2025.10.28 | 0 |
| 1 | Set-up in x64 Debian for development | me | 2025.10.27 | 0 |