

Mar. 12, 2025 Status
2025.03.12 22:17
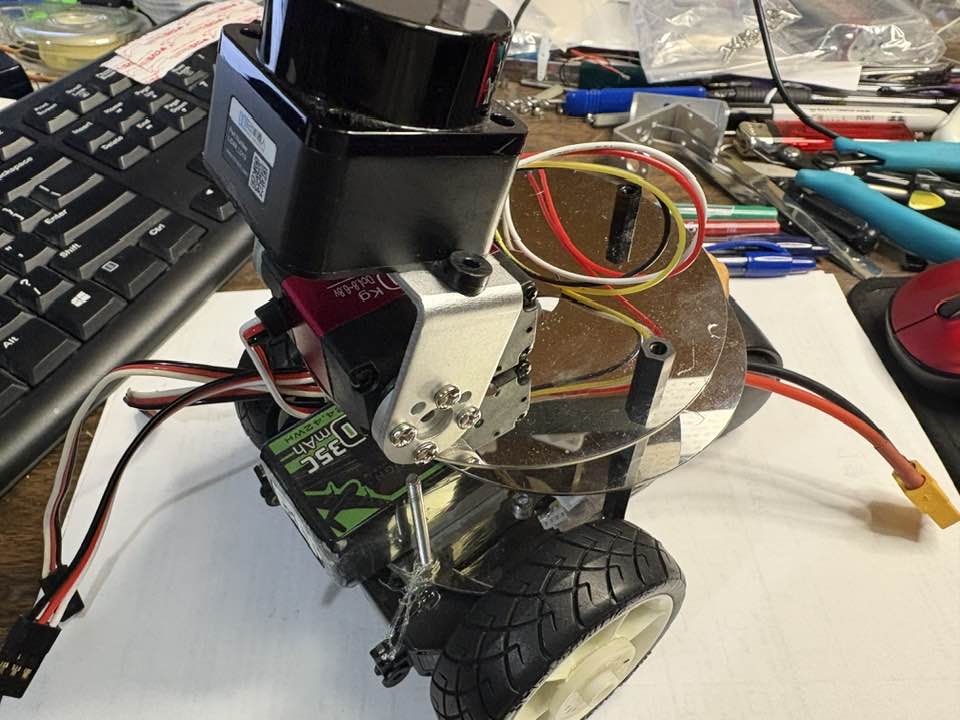
Basic OS : Debian
CPU : RK3566 with NPU 1 TOPS
Radxa Camera 8M 219
My Camera : /dev/video-camera0
- Stream didn't work on remote desktop, but capture worked.
apt install eog # light weight image viewer
Python version 3.9.2
2D Lidar connection to UART : UART3-M0 or UART5-M1
I2C Master connection to Mini :
I2C4-M0 :
Pin27 (Red Cable)
Pin28 (Yellow Cable)
------------------------------------
Arduino Pro Mini (ATmega 328P 3V3 8Mhz)'s pin usage
7 : Lidar Servo
8 : Left Wheel
9 : Right Wheel
I2C Slave connection to Radxa mini 3W :
A4 (SDA) - Red Cable
A5 (SCL) - Yellow Cable
------------------------------------------
(Updates done)
apt install unzip # file extractor : needed for rknn library zip file extraction
apt install cheese # camera viewer - without monitor, it doesn't work.
apt install guvcview # camera viewer - without monitor, it doesn't work.
apt install eog # light weight image viewer, used to check image grabbed by camera.
(for Lazarus IDE installation) - with fpcupdeluxe
apt install make
apt install gdb
apt install libx11-dev libgtk2.0-dev
then Run fpcupdeluxe

Comment 0
| No. | Subject | Author | Date | Views |
|---|---|---|---|---|
| 12 |
Debian에 Snowflake SSH Client 설치 방법.
| me | 2025.10.03 | 62 |
| 11 | Study G-Code, get ready to build factory | me | 2025.06.25 | 87 |
| 10 | I asked Google's Gemini for parsing code. | me | 2025.04.17 | 334 |
| 9 |
ESP-NOW without Long Range & External Antenna is terrible!
| me | 2025.04.16 | 316 |
| 8 |
ESP-NOW with ESP8266 - Two way communication test done
| me | 2025.04.11 | 319 |
| 7 |
Retry on PWM from Radxa ZERO 3W for servo control
| me | 2025.03.25 | 301 |
| 6 | Problems found on I2C communication | me | 2025.03.22 | 289 |
| 5 | radxa zero 3w running an app on booting | me | 2025.03.13 | 381 |
| 4 |
Basic Communication between ZERO 3W <==> Pro Mini via I2C
| me | 2025.03.13 | 344 |
| 3 | Important Links | me | 2025.03.12 | 345 |
| 2 | To-Do List as of Mar. 12, 2025 | me | 2025.03.12 | 334 |
| » |
Mar. 12, 2025 Status
| me | 2025.03.12 | 315 |