
MAR (Machine of Attack & Return). V.01 ( THIS IS TOY R/C LEVEL DEVICE, NOT A REAL WEAPON )
Intro (Keeps changing)
2023.09.28 11:42
Introduction
Development Folder Location
On PC's Ground Station Code : ~/ap/MAR01
Arduino Code on PC : ~/ap/MAR01_ARD
On Orange Pi 5 's Code : /root/ap/MAR01PI
Communication Method
PC <=> O-Pi 5 : UDP Wifi during development, then change in the future to Long-Range Wireless
O-Pi 5 <=> Arduino Nano : UART Serial
Parts (Keeps changing)
--------------------------------
PC (Ground Station)
Orange Pi 5 (Main brain of machine - with NPU, YOLO8 enabled)
Arduino (ESC Control and other boot-up time control)
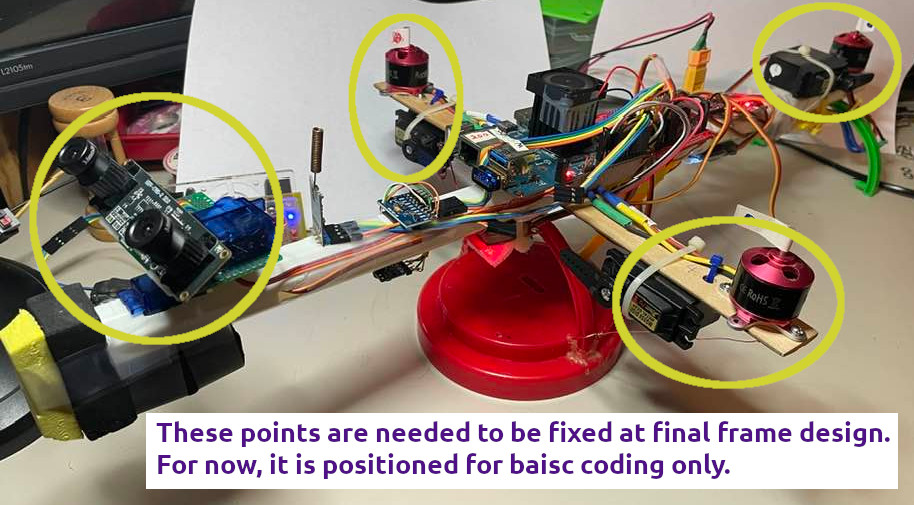
BLDC Motors (For Flying)
ESC 30A (For BLDC Motors)
MIPI Camera (High Resolution)
USB Stereo CAM (For Fast Distance Measurement)
MATEK Power Distribution Board
Batteries
Comment 0
| No. | Subject | Author | Date | Views |
|---|---|---|---|---|
| 10 | New software resources | me | 2024.02.20 | 115 |
| 9 | Simple Attraction & Repulsion of Swarm practice | me | 2024.02.01 | 115 |
| 8 |
My Simple 2D Inverse Kinematics with BGRABitmat library [2]
| me | 2024.01.21 | 141 |
| 7 |
My Simple 2D Inverse Kinematics with BGRABitmat library [1]
| me | 2024.01.20 | 118 |
| 6 |
Inverse Kinematic with AI
| me | 2024.01.19 | 125 |
| 5 |
Inverse Kinematic in 10 min. from YouTube
| me | 2024.01.19 | 137 |
| 4 | My notebook system camera test | me | 2024.01.19 | 108 |
| 3 |
Binocular Cam
| me | 2024.01.14 | 116 |
| 2 | Object Pascal with MPU-9250 | me | 2023.10.06 | 114 |
| » |
Intro (Keeps changing)
| me | 2023.09.28 | 130 |