
MAR (Machine of Attack & Return). V.01 ( THIS IS TOY R/C LEVEL DEVICE, NOT A REAL WEAPON )
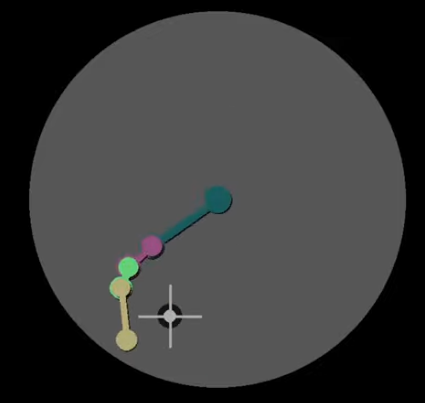
Inverse Kinematic with AI
2024.01.19 16:31
Learn from sample code : https://github.com/OmarJItani/Deep-Neural-Network-for-Solving-the-Inverse-Kinematics-Problem?fbclid=IwAR0PaL39gFw6mYR3mWtUCDjwF0gD_0O8j6lX3U6aG-guFp1IYVbBnZ7txMk
* for practive project
* for real targeting from drone.

####################################################################
Object Pascal Example : from https://youtu.be/mMhF3_8uiv0?si=0nyJwsuO7ZmXyK2M
unit Unit1;
{$mode objfpc}{$H+}
interface
uses
Classes, SysUtils, FileUtil, Forms, Controls, Graphics, Dialogs, StdCtrls,
ExtCtrls, ComCtrls, Math;
type
TArm = record
r : Integer;
color : TColor;
x2,y2, x1, y1, angle_rad : Single;
end;
{ TForm1 }
TForm1 = class(TForm)
StatusBar1: TStatusBar;
procedure FormCreate(Sender: TObject);
procedure FormMouseMove(Sender: TObject; Shift: TShiftState; X, Y: Integer);
private
procedure Transform(i : Integer; x,y : Single);
public
end;
const maxParts = 10;
var
Form1: TForm1;
arm : array[0..maxParts+1] of TArm;
implementation
{$R *.lfm}
{ TForm1 }
procedure TForm1.FormCreate(Sender: TObject);
begin
arm[0].r:=20;
arm[0].color:=clRed;
arm[1].r:=20;
arm[1].color:=clBlue;
arm[2].r:=20;
arm[2].color:=clGreen;
arm[3].r:=20;
arm[3].color:=clYellow;
arm[4].r:=20;
arm[4].color:=clMaroon;
arm[5].r:=20;
arm[5].color:=$FFFF00;
arm[6].r:=20;
arm[6].color:=$808000;
arm[7].r:=20;
arm[7].color:=$FF00FF;
arm[8].r:=20;
arm[9].r:=20;
arm[10].r:=20;
canvas.Brush.Color:=clWhite;
canvas.pen.Width:=5;
canvas.pen.Color:=clRed;
end;
procedure TForm1.Transform(i : Integer; x, y : Single);
begin
arm[i].angle_rad:=ArcTan2((y-arm[i].y1),(x-arm[i].x1));
if arm[i].x1 = x then begin
if y > arm[i].y1 then arm[i].angle_rad := 0.5*pi else arm[i].angle_rad := 1.5*pi;
end;
if arm[i].angle_rad<0 then arm[i].angle_rad:=2*pi+arm[i].angle_rad;
arm[i].x1:=(arm[i].x2)-arm[i].r*cos(arm[i].angle_rad);
arm[i].y1:=(arm[i].y2)-arm[i].r*sin(arm[i].angle_rad);
end;
procedure TForm1.FormMouseMove(Sender: TObject; Shift: TShiftState; X,
Y: Integer);
var k, t : Integer;
begin
if ssleft in shift then
begin
// canvas.Clear;
Canvas.FillRect(ClientRect);
arm[maxParts+1].x1:=x;
arm[maxParts+1].y1:=y;
for k:=maxParts downto 0 do begin
arm[k].x2:=arm[k+1].x1;
arm[k].y2:=arm[k+1].y1;
Transform(k,arm[k].x2,arm[k].y2);
Canvas.Pen.Color:=arm[k].color;
Canvas.Line(Round(arm[k].x1),Round(arm[k].y1),Round(arm[k].x2),Round(arm[k].y2));
end;
{
arm[1].x2:=x;
arm[1].y2:=y;
Transform(1,x,y);
arm[0].x2:=arm[1].x1;
arm[0].y2:=arm[1].y1;
Transform(0,arm[0].x2,arm[0].y2);
Canvas.FillRect(ClientRect);
Canvas.Line(Round(arm[1].x1),Round(arm[1].y1),Round(arm[1].x2),Round(arm[1].y2));
Canvas.Line(Round(arm[0].x1),Round(arm[0].y1),Round(arm[0].x2),Round(arm[0].y2));
}
end;
end;
end.
Comment 0
| No. | Subject | Author | Date | Views |
|---|---|---|---|---|
| 10 | New software resources | me | 2024.02.20 | 88 |
| 9 | Simple Attraction & Repulsion of Swarm practice | me | 2024.02.01 | 88 |
| 8 |
My Simple 2D Inverse Kinematics with BGRABitmat library [2]
| me | 2024.01.21 | 119 |
| 7 |
My Simple 2D Inverse Kinematics with BGRABitmat library [1]
| me | 2024.01.20 | 101 |
| » |
Inverse Kinematic with AI
| me | 2024.01.19 | 106 |
| 5 |
Inverse Kinematic in 10 min. from YouTube
| me | 2024.01.19 | 85 |
| 4 | My notebook system camera test | me | 2024.01.19 | 88 |
| 3 |
Binocular Cam
| me | 2024.01.14 | 88 |
| 2 | Object Pascal with MPU-9250 | me | 2023.10.06 | 97 |
| 1 |
Intro (Keeps changing)
| me | 2023.09.28 | 103 |