
MAR (Machine of Attack & Return). V.01 ( THIS IS TOY R/C LEVEL DEVICE, NOT A REAL WEAPON )
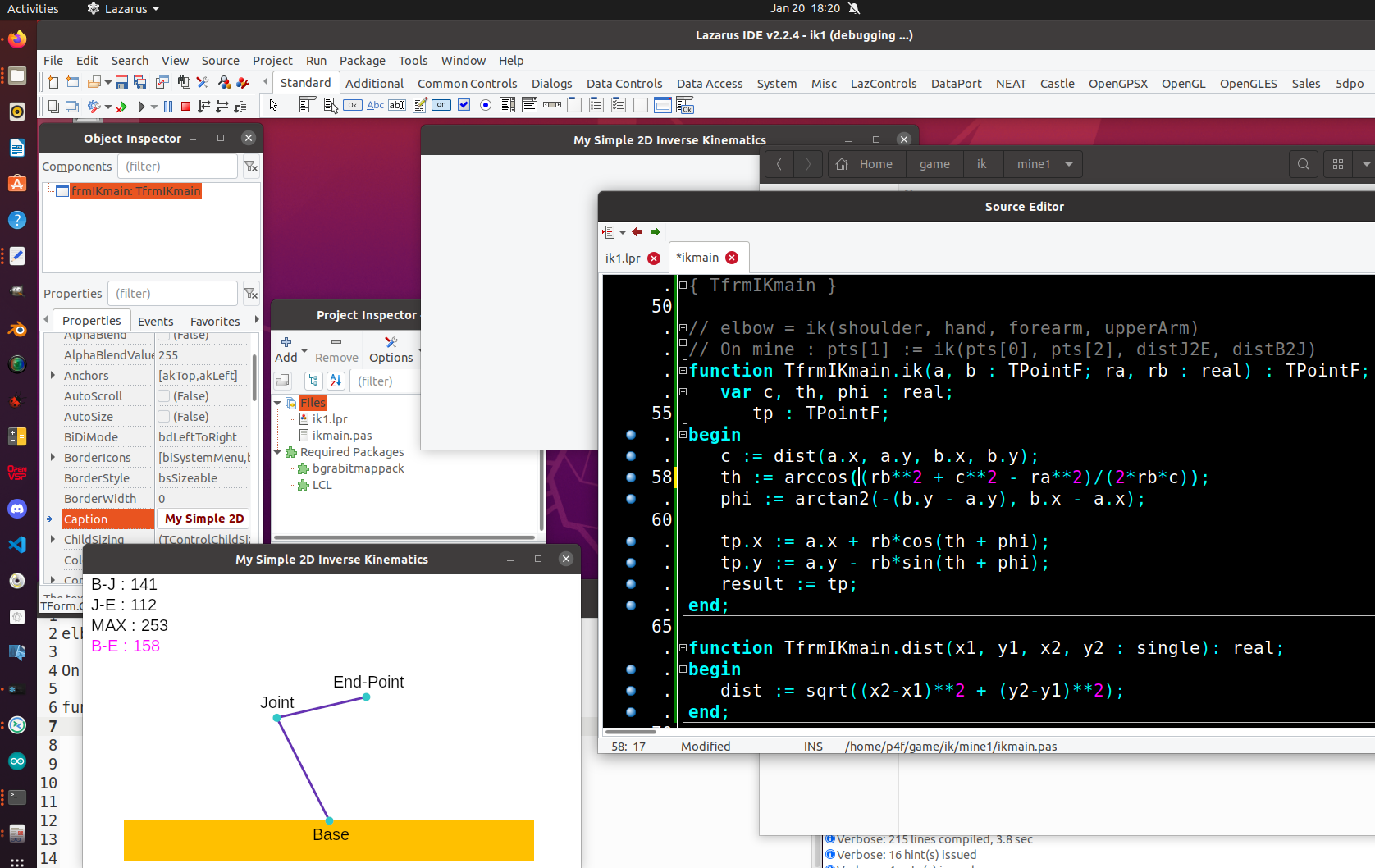
My Simple 2D Inverse Kinematics with BGRABitmat library [2]
2024.01.21 02:40
More Inverse Kinematics.
< Display of Angles added >
Code is in Attachment (code.zip)
unit ikmain;
{$mode objfpc}{$H+}
interface
uses
Classes, SysUtils, FileUtil, Forms, Controls, Graphics, Dialogs, StdCtrls,
BGRABitmap, BGRABitmapTypes, LMessages, ExtCtrls, BGRAPath;
const
END_POINT = 2;
type
{ TfrmIKmain }
TfrmIKmain = class(TForm)
procedure FormCreate(Sender: TObject);
procedure FormDestroy(Sender: TObject);
procedure FormPaint(Sender: TObject);
procedure FormMouseDown(Sender: TObject; Button: TMouseButton;
{%H-}Shift: TShiftState; X, Y: Integer);
procedure FormMouseMove(Sender: TObject; Shift: TShiftState; X, Y: Integer);
procedure FormMouseUp(Sender: TObject; Button: TMouseButton;
{%H-}Shift: TShiftState; {%H-}X, {%H-}Y: Integer);
public
{ public declarations }
pts: array of TPointF;
MovingPointIndex: Integer;
MovingOrigin: TPointF;
MyScreen: TBGRAPath;
distB2J, distJ2E, distB2E, distMax, AngA, AngJ, AngJa,
StartAng, EndingAng, xA, xJ : real;
procedure RepaintScreenChange;
function dist(x1, y1, x2, y2 : single): real;
function ik(a, b : TPointF; ra, rb : real) : TPointF;
end;
var
frmIKmain: TfrmIKmain;
implementation
{$R *.lfm}
uses math;
{ TfrmIKmain }
// elbow = ik(shoulder, hand, forearm, upperArm)
// On mine : pts[1] := ik(pts[0], pts[2], distJ2E, distB2J)
function TfrmIKmain.ik(a, b : TPointF; ra, rb : real) : TPointF;
var c, th, phi : real;
tp : TPointF;
begin
c := dist(a.x, a.y, b.x, b.y);
th := arccos((rb**2 + c**2 - ra**2)/(2*rb*c));
phi := arctan2(-(b.y - a.y), b.x - a.x);
tp.x := a.x + rb*cos(th + phi);
tp.y := a.y - rb*sin(th + phi);
result := tp;
end;
function TfrmIKmain.dist(x1, y1, x2, y2 : single): real;
begin
dist := sqrt((x2-x1)**2 + (y2-y1)**2);
end;
procedure TfrmIKmain.FormCreate(Sender: TObject);
begin
setlength(pts,3); // set PTS point array's number of points
// set position of each points in PTS point array
pts[0] := PointF(300,300); // B : Base
pts[1] := PointF(400,200); // J : Joint
pts[2] := PointF(500,250); // E : End Point
// Getting distance : distB2J, distJ2E, distB2E, distMax
distB2J := round(dist(pts[0].x, pts[0].y, pts[1].x, pts[1].y));
distJ2E := round(dist(pts[1].x, pts[1].y, pts[2].x, pts[2].y));
distB2E := round(dist(pts[0].x, pts[0].y, pts[2].x, pts[2].y));
distMax := distB2J + distJ2E;
xA := pts[1].x - pts[0].x;
AngA := arccos(xA/distB2J);
xJ := pts[2].x - pts[1].x;
AngJ := arccos(xA/distB2J);
end;
procedure TfrmIKmain.FormDestroy(Sender: TObject);
begin
FreeAndNil(MyScreen);
end;
procedure TfrmIKmain.FormPaint(Sender: TObject);
var bmp: TBGRABitmap;
i: Integer;
style: TSplineStyle;
nbPoints: integer;
pt,tangent: TPointF;
begin
//PreviousSize := PointF(ClientWidth,clientheight);
bmp := TBGRABitmap.Create(clientwidth,clientheight,BGRAWhite);
nbPoints := length(pts);
if MyScreen = nil then
MyScreen := TBGRAPath.Create;
if Assigned(MyScreen) then begin
MyScreen.fill(bmp, BGRA(250,250,0));
// Draw ground rectangle & symbol marks
bmp.FillRect(50, 300, 550, 350, BGRA(255, 192, 0), dmSet);
bmp.TextOut(280, 305, 'Base', BGRABlack);
bmp.TextOut(pts[1].x-20, pts[1].y-30, 'Joint', BGRABlack);
bmp.TextOut(pts[2].x-40, pts[2].y-30, 'End-Point', BGRABlack);
// Draw line between points
bmp.DrawPolyLineAntialias(slice(pts,nbPoints),BGRA(102,50,179),3);
for i := 0 to nbPoints-1 do // Draw circle on each points
bmp.FillEllipseAntialias(pts[i].x,pts[i].y,5,5,BGRA(50,200,200));
// distB2J, distJ2E, distB2E, distMax
bmp.TextOut(10, 0, 'B-J : ' + inttostr(round(distB2J)), BGRABlack);
bmp.TextOut(10, 25, 'J-E : ' + inttostr(round(distJ2E)), BGRABlack);
bmp.TextOut(10, 50, 'MAX : ' + inttostr(round(distMax)), BGRABlack);
xA := pts[1].x - pts[0].x;
AngA := arccos(xA/distB2J);
bmp.Canvas2D.strokeStyle (VGAFuchsia);
bmp.Canvas2D.arc(pts[0].x, pts[0].y, 40, 0, -AngA, TRUE);
bmp.Canvas2D.stroke();
//distB2E := round(dist(pts[0].x, pts[0].y, pts[2].x, pts[2].y));
bmp.TextOut(pts[0].x+20, pts[0].y-30, format('%5.2f', [RadToDeg(AngA)]), VGAFuchsia);
// Center Radian : C = atan ((P2.y-C.y)/(P2.x-C.x)) - atan((P1.y-C.y)/(P1.x-C.x))
AngJ := ArcTan((pts[2].y-pts[1].y)/(pts[2].x-pts[1].x))
- ArcTan((pts[0].y-pts[1].y)/(pts[0].x-pts[1].x));
bmp.Canvas2D.moveto(pts[1].x,pts[1].y);
//StartAng := ArcTan((pts[1].y-pts[0].y)/(pts[1].x-pts[0].x)) + PI; // Get Start Engle
if pts[1].x > pts[0].x then // Left Side
begin
StartAng := ArcTan((pts[1].y-pts[0].y)/(pts[1].x-pts[0].x)) + PI; // Get Start Engle
EndingAng:= ArcTan((pts[2].y-pts[1].y)/(pts[2].x-pts[1].x));
AngJ := AngJ - PI;
AngJa := -RadToDeg(AngJ);
bmp.Canvas2D.arc(pts[1].x, pts[1].y, 40, StartAng, EndingAng, true);
end
else
begin // Right Side
StartAng := ArcTan((pts[1].y-pts[0].y)/(pts[1].x-pts[0].x)); // Get Start Engle
EndingAng:= ArcTan((pts[2].y-pts[1].y)/(pts[2].x-pts[1].x));
AngJa := -RadToDeg(AngJ);
bmp.Canvas2D.arc(pts[1].x, pts[1].y, 40, StartAng, EndingAng, true);
end;
bmp.Canvas2D.stroke();
bmp.TextOut(pts[1].x+20, pts[1].y-10, format('%5.2f', [AngJa]), VGAFuchsia);
end;
bmp.draw(Canvas,0,0);
bmp.Free;
end;
procedure TfrmIKmain.FormMouseDown(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
var maxDist, distance: single;
mousePos,vect: TPointF;
i: Integer;
begin
if Button <> mbLeft then exit; // react to only left button
//select point to move
MovingPointIndex := -1; // deselect a point
maxDist := 10; // point selection proximity distance
mousePos := PointF(X,Y); // set current position
MovingOrigin := mousePos; // new MovingOrigin
vect := pts[END_POINT] - mousePos;
distance := sqrt(vect*vect);
if distance < maxDist then begin // a point is selected (within proximity)
maxDist := distance;
MovingPointIndex := END_POINT;
end;
end;
procedure TfrmIKmain.FormMouseMove(Sender: TObject; Shift: TShiftState; X,
Y: Integer);
var
mousePos: TPointF;
i: Integer;
tp0, tp1, tp2 : TPointF;
OverLimit : boolean;
begin
if Y >= 300 then Y := 300; // Limit Bottom
OverLimit := false;
mousePos := PointF(X,Y);
if MovingPointIndex = 2 then begin // if selected point is the END POINT
// Preserve Old Points in case it move over the limit.
tp0 := pts[0]; // base
tp1 := pts[1]; // joint
tp2 := pts[2]; // end point
// change the end-points to new location
if tp2.y >= 300 then
OverLimit := true
else
tp2.Offset(mousePos-MovingOrigin);
tp1 := ik(tp0, tp2, distJ2E, distB2J);
if tp2.y >= 300 then OverLimit := true;
// prevent joint goes under the base
if tp1.y >= 300 then OverLimit := true;
// prevent end point go over the full length
if dist(tp0.x, tp0.y, tp2.x, tp2.y) > distMax then OverLimit := true;
// if new motion is not over the limit
if not OverLimit then begin
pts[2] := tp2;
pts[1] := tp1;
end;
end;
RepaintScreenChange;
MovingOrigin := mousePos;
end;
procedure TfrmIKmain.FormMouseUp(Sender: TObject; Button: TMouseButton;
Shift: TShiftState; X, Y: Integer);
begin
if Button = mbLeft then MovingPointIndex := -1; // no more a point is selected
end;
procedure TfrmIKmain.RepaintScreenChange;
begin
FreeAndNil(MyScreen);
Invalidate; // repaint
end;
end.
(New .mkv video demo is in attachment)
Comment 0
| No. | Subject | Author | Date | Views |
|---|---|---|---|---|
| 10 | New software resources | me | 2024.02.20 | 105 |
| 9 | Simple Attraction & Repulsion of Swarm practice | me | 2024.02.01 | 105 |
| » |
My Simple 2D Inverse Kinematics with BGRABitmat library [2]
| me | 2024.01.21 | 133 |
| 7 |
My Simple 2D Inverse Kinematics with BGRABitmat library [1]
| me | 2024.01.20 | 112 |
| 6 |
Inverse Kinematic with AI
| me | 2024.01.19 | 119 |
| 5 |
Inverse Kinematic in 10 min. from YouTube
| me | 2024.01.19 | 135 |
| 4 | My notebook system camera test | me | 2024.01.19 | 105 |
| 3 |
Binocular Cam
| me | 2024.01.14 | 107 |
| 2 | Object Pascal with MPU-9250 | me | 2023.10.06 | 110 |
| 1 |
Intro (Keeps changing)
| me | 2023.09.28 | 118 |