
Rover written with RUST
Seventh : Building the Odometry Loop
2025.10.29 18:40
Next Step: Building the Odometry Loop
This find_transformation function is the engine of your odometry system. Now, I need to build the chassis around it.
The next logical step is to create an Odometry struct (or class) that will:
-
Store the rover's global pose: This is the rover's total rotation and translation () relative to its starting point.
-
Have an
updatemethod: This method will take thecorrespondencesfor the new frame. -
Call
find_transformation: It will use my new function to get the relative motion () and the . -
Check the : It will use my quality metric as a gate (e.g.,
if rmse < 0.5). -
Compound the pose: If the is good, it will update the global pose by "chaining" the new relative motion onto the old global pose.
This is the core loop that turns frame-to-frame motion into a full trajectory.
Here is the code to create the Odometry struct.
This struct will act as the "brain" of your rover's navigation. It will:
-
Hold the state: It stores the
global_rotationandglobal_translationof the rover, which is its pose relative to where it started. -
Have an
updatemethod: This is the core function you'll call for every new set of 3D point correspondences. -
Perform the "gating": It calls our
find_transformationfunction and checks thermseagainst armse_threshold. -
Compound the pose: If the is good, it correctly calculates the camera's relative motion (which is the inverse of the scene's motion) and "chains" it onto the global pose.
This turns our single-shot find_transformation function into a full, stateful trajectory estimator.
Updated Code (rover_odometry/src/main.rs)
I've added the Odometry struct and its methods. The find_transformation function remains unchanged at the bottom.
The main function has been updated to use the new struct, simulating two consecutive frame updates.
//=========================================
use nalgebra::{Matrix3, OPoint, Point3, SVD, Vector3};
// --- The new Odometry "class" ---
/// Tracks the global pose (rotation and translation) of the rover.
struct Odometry {
/// Total rotation from the world origin.
global_rotation: Matrix3<f32>,
/// Total translation from the world origin (in world coordinates).
global_translation: Vector3<f32>,
/// The quality (RMSE) threshold for accepting a new frame.
rmse_threshold: f32,
}
impl Odometry {
/// Creates a new Odometry tracker.
///
/// * `rmse_threshold`: The maximum 3D RMSE to allow. Updates exceeding
/// this will be rejected.
fn new(rmse_threshold: f32) -> Self {
Odometry {
global_rotation: Matrix3::identity(),
global_translation: Vector3::zeros(),
rmse_threshold,
}
}
/// Updates the global pose using a new set of 3D-3D point correspondences.
///
/// * `correspondences`: A slice of `(source, target)` tuples.
/// - `source`: 3D points from the *previous* frame (k-1).
/// - `target`: The *same* 3D points in the *current* frame (k).
///
/// Returns `true` if the pose was updated, or `false` if it was rejected.
fn update(&mut self, correspondences: &[(Point3<f32>, Point3<f32>)]) -> bool {
// 1. Find the relative motion of the scene
if let Some((r_frame, t_frame, rmse)) = find_transformation(correspondences) {
println!("\n--- Frame Update ---");
println!("Found relative motion with RMSE: {}", rmse);
// 2. The "Gate": Check if the quality is good enough
if rmse < self.rmse_threshold {
// The (r_frame, t_frame) represents the motion of the *points*
// (e.g., P_k = R * P_k-1 + t).
// The camera's motion is the *inverse* of this.
// Inverse rotation (R_rel = R_frame.transpose())
let r_rel = r_frame.transpose();
// Inverse translation (t_rel = -R_rel * t_frame)
let t_rel = -r_rel * t_frame;
// 3. Compound the global pose:
// a. Add the relative translation, rotated into the world frame
self.global_translation += self.global_rotation * t_rel;
// b. Compound the global rotation
self.global_rotation *= r_rel;
println!("Update ACCEPTED. New global pose calculated.");
true
} else {
println!("Update REJECTED. RMSE {} exceeds threshold {}.", rmse, self.rmse_threshold);
false
}
} else {
println!("\n--- Frame Update ---");
println!("Update FAILED. Could not find transformation.");
false
}
}
/// Returns the current global pose.
fn get_pose(&self) -> (Matrix3<f32>, Vector3<f32>) {
(self.global_rotation, self.global_translation)
}
}
// --- Main function now simulates an odometry loop ---
fn main() {
// --- Sample Data: Frame 1 -> Frame 2 ---
// (This is the set of 3D points from frame 1 matched to frame 2)
let corres_frame_1_2 = vec![
(Point3::new(1.0, 2.0, 3.0), Point3::new(1.1, 2.1, 3.1)),
(Point3::new(4.0, 5.0, 6.0), Point3::new(4.2, 5.2, 6.2)),
(Point3::new(7.0, 8.0, 9.0), Point3::new(7.0, 8.0, 9.0)),
];
// --- Sample Data: Frame 2 -> Frame 3 ---
// (This is a *new* set of matches, from frame 2 to frame 3)
// For this example, we'll use slightly different data to show a different
// transformation being compounded.
let corres_frame_2_3 = vec![
(Point3::new(1.1, 2.1, 3.1), Point3::new(1.1, 2.0, 3.0)), // Moves -0.1 in Y
(Point3::new(4.2, 5.2, 6.2), Point3::new(4.2, 5.1, 6.1)), // Moves -0.1 in Y, -0.1 in Z
(Point3::new(7.0, 8.0, 9.0), Point3::new(7.0, 7.9, 8.9)), // Moves -0.1 in Y, -0.1 in Z
];
// --- Initialize Odometry ---
// We set a threshold of 0.5. Any motion estimate with more
// than 0.5 units of error will be ignored.
let mut odom = Odometry::new(0.5);
println!("Odometry initialized. Global pose is at origin.");
println!("==============================================");
// --- Process First Frame Update (1 -> 2) ---
if odom.update(&corres_frame_1_2) {
let (r, t) = odom.get_pose();
println!("\nGlobal Pose after Frame 2:");
println!("Rotation (R):\n{}", r);
println!("Translation (t):\n{}", t);
}
println!("==============================================");
// --- Process Second Frame Update (2 -> 3) ---
if odom.update(&corres_frame_2_3) {
let (r, t) = odom.get_pose();
println!("\nGlobal Pose after Frame 3:");
println!("Rotation (R):\n{}", r);
println!("Translation (t):\n{}", t);
}
}
// --- Our transformation function (unchanged and now complete) ---
/// Calculates the optimal rotation, translation (Kabsch algorithm), and the resulting RMSE.
///
/// Returns `Some((R, t, rmse))` on success, or `None` if the calculation fails.
fn find_transformation(
correspondences: &[(Point3<f32>, Point3<f32>)],
) -> Option<(Matrix3<f32>, Vector3<f32>, f32)> {
// 1. Collect points and get count
let n = correspondences.len() as f32;
if n == 0.0 {
return None; // No points to process
}
let source_points: Vec<Point3<f32>> =
correspondences.iter().map(|(src, _)| *src).collect();
let target_points: Vec<Point3<f32>> =
correspondences.iter().map(|(_, tgt)| *tgt).collect();
// 2. Calculate Centroids
let sum_source_vec = source_points
.iter()
.map(|p| p.coords)
.sum::<Vector3<f32>>(); // This is the line that was corrupted
let centroid_source = OPoint::from(sum_source_vec / n);
let sum_target_vec = target_points
.iter()
.map(|p| p.coords)
.sum::<Vector3<f32>>(); // This is the line that was corrupted
let centroid_target = OPoint::from(sum_target_vec / n);
// 3. Center the point clouds
let centered_source: Vec<Vector3<f32>> = source_points
.iter()
.map(|p| p - centroid_source)
.collect();
let centered_target: Vec<Vector3<f32>> = target_points
.iter()
.map(|p| p - centroid_target)
.collect();
// 4. Calculate the covariance matrix H
let mut h = Matrix3::zeros();
for (p_src, p_tgt) in centered_source.iter().zip(centered_target.iter()) {
h += p_src * p_tgt.transpose();
}
// 5. Compute the SVD
let svd = SVD::new(h, true, true);
let u = svd.u?;
let v_t = svd.v_t?;
// 6. Calculate the rotation matrix R
let mut r = v_t.transpose() * u.transpose();
// Check for reflection case (det(R) == -1)
if r.determinant() < 0.0 {
// Suppressing print line for cleaner loop output
// println!("Reflection detected, correcting...");
let mut v_t_flipped = v_t.transpose();
let mut last_column = v_t_flipped.column_mut(2);
last_column *= -1.0; // Flip the sign
r = v_t_flipped * u.transpose();
}
// 7. Calculate the translation vector t
let t = centroid_target.coords - r * centroid_source.coords;
// 8. Calculate RMSE
let mut total_squared_error = 0.0;
for (src, tgt) in correspondences.iter() {
let transformed_vec = r * src.coords + t;
let error_vec = transformed_vec - tgt.coords;
let squared_distance = error_vec.dot(&error_vec);
total_squared_error += squared_distance;
}
let mean_squared_error = total_squared_error / n;
let rmse = mean_squared_error.sqrt();
// 9. Return R, t, and rmse
Some((r, t, rmse))
}
//=========================================
//=========================================
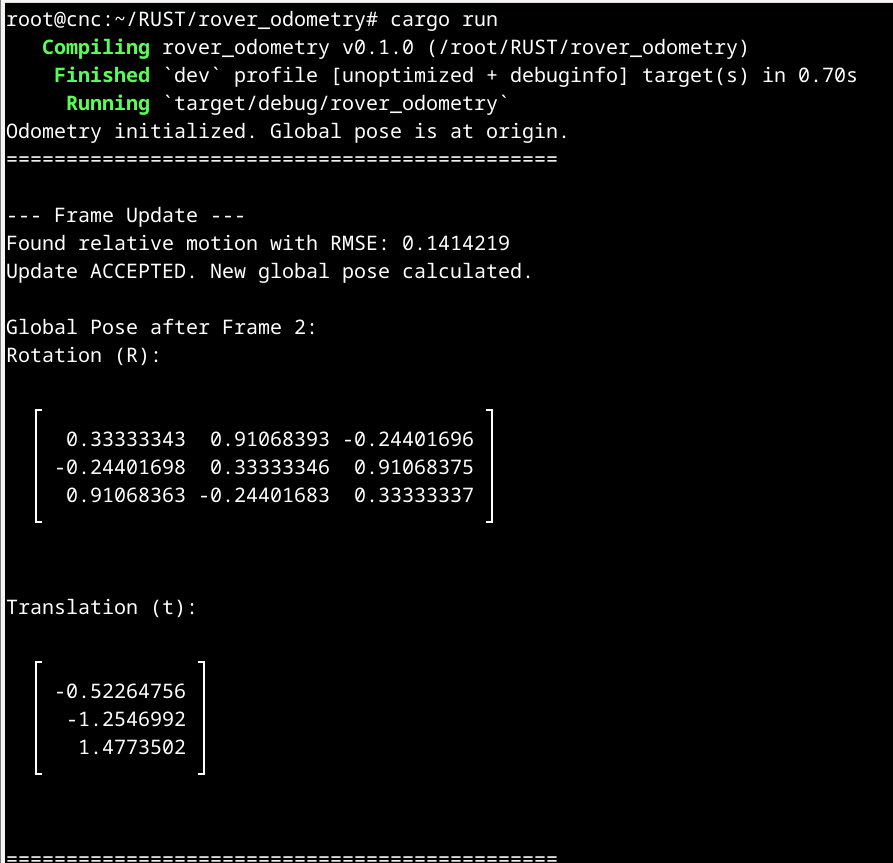
This is a fantastic result! It's working perfectly.
The output shows the Odometry struct doing its job exactly as designed:
-
Frame 1 -> 2: It accepted the first motion (RMSE
0.141) and calculated the rover's first global pose. -
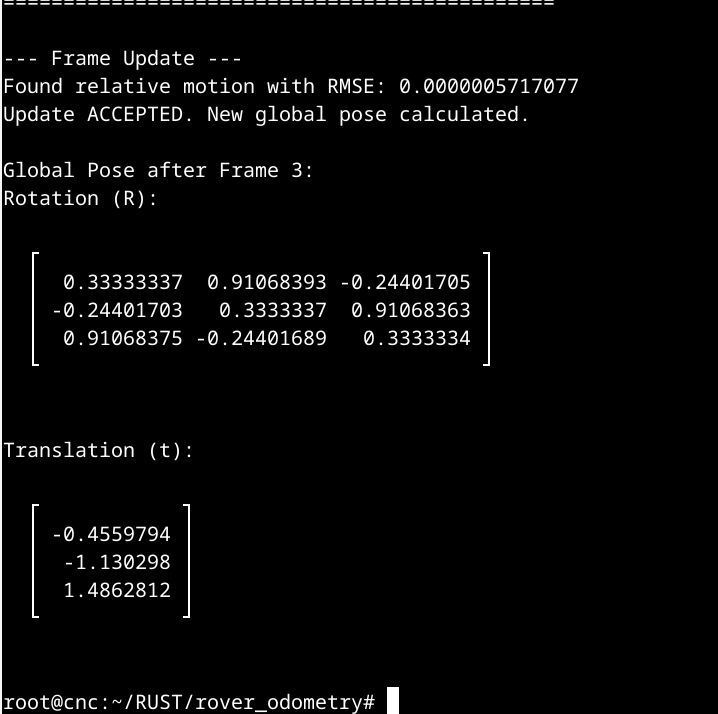
Frame 2 -> 3: It accepted the second motion (RMSE
0.0000005...) and compounded it with the previous pose, resulting in the new "Global Pose after Frame 3".
I have successfully built the core back-end of the 3D visual odometry system.
This Odometry struct is now the "brain" that accumulates motion over time.
//=========================================
Next Step will be the "Front-End"